Turtlesim은 실제 로봇이 없더라도 가상의 컴퓨터 화면에서 쉽게 ROS를 통해서 로봇을 구동할 수 있게 해주는 플랫폼이다.
1. 터미널에서 아래의 명령어로 turtlesim을 설치한다. (foxy 기준)
sudo apt update && upgrade
sudo apt install ros-foxy-turtlesim
2. 아래의 명령어로 ROS2에 설치되어 있는 패키지의 리스트를 확인할 수 있으며, turtlesim을 설치하면 turtlesim 역시 리스트에 포함되어 있다.
ros2 pkg list
3. turtlesim 패키지에 포함되어 있는 노드를 확인할 수 있다.
ros2 pgk executables turtlesim
draw_square: 사각형 모양으로 turtle을 움직이게 하는 노드
mimic: 사용자가 지정한 토픽으로 동일 움직임의 turtlesim_node를 복수개 실행시킬 수 있는 노드
turtle_teleop_key: turtlesim_node를 움직이게 하는 속도 값을 퍼블리시 하는 노드
turtlesim nodeturtle_teleop_key로 부터 속도 값을 토픽으로 받아 움직이게 하는 간단 2D 시뮬레이터 노드
4. Turtlesim_node를 실행 시키면 파란색 창에 거북이 한마리가 나타난다.
ros2 run turtlesim turtlesim_node
5. 새로운 터미널 창에서 turtle_teleop_key를 실행시키면 화살표키로 거북이를 움직일 수 있다.
ros2 run turtlesim turtle_teleop_key
turtle_teleop_key 명령을 입력한 터미털 창에서 화살표키를 눌러야 하며, 작동하지 않을시 아래의 명령으로 talker와 listener가 제대로 작동하는지 확인해보자
# 터미널창 1 source /opt/ros/foxy/setup.bass
ros2 run demo_nodes_cpp talker
# 터미널창 2 source /opt/ros/foxy/setup.bash
ros2 run demo_nodes_py listener
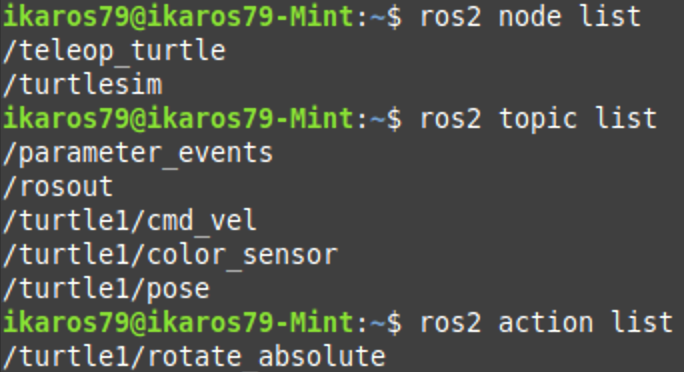
6. turtlesim_node와 turtlesim_teleop_key가 실행중인 상태에서 새 터미털 창에서 node list, topic list, service list, action list를 실행시켜서 현재 작동중인 노트, 토픽, 서비스, 액션 등을 확인할 수 있다.
7. CLI (command line interface) 툴이 아닌 GUI 툴을 사용해서 현재 각 노드, 토픽, 액션 등의 상태를 그래프로 확인할 수 있다.
rqt_graph
'ROS2' 카테고리의 다른 글
| ROS2를 활용해서 xArm5 Lite 제어하기 (0) | 2020.09.10 |
|---|---|
| ROS2 용어정리 (0) | 2020.09.10 |
| ROS2용 Gazebo (v.9) 설치 및 테스트 (0) | 2020.09.10 |
| Linux에 ROS 2 설치하기 (0) | 2020.09.03 |
| macOS에 ROS 2 설치하기 (2) | 2020.09.03 |



댓글