Gazebo는 로봇 개발에 필요한 시뮬레이션을 지원하고, 물리엔진을 탑재해서 실제와 비슷한 상황을 구현해주는 3차원 Simulator이다.
아래 내용의 출처는 Gazebosim의 페이지에서 확인할 수 있다.
1. ROS 2 Foxy 기준으로 아래 명령어로 Gazebo 설치가 가능하다.
sudo apt install ros-foxy-gazebo-ros-pkgs
2. Gazebo 설치가 제대로 되어 있는지 테스트 하기 전에 먼저 ROS 2를 소싱한다.
source /opt/ros/foxy/setup.bash
3. Core tools가 설치되어 있는지 확인한다.
sudo apt install ros-foxy-ros-core ros-foxy-geometry2
4. Differential drive world를 로드한다.
gazebo --verbose /opt/ros/foxy/share/gazebo_plugins/worlds/gazebo_ros_diff_drive_demo.world
5. 심플한 차량 형태의 모델이 Gazebo GUI 내에서 나타난다.

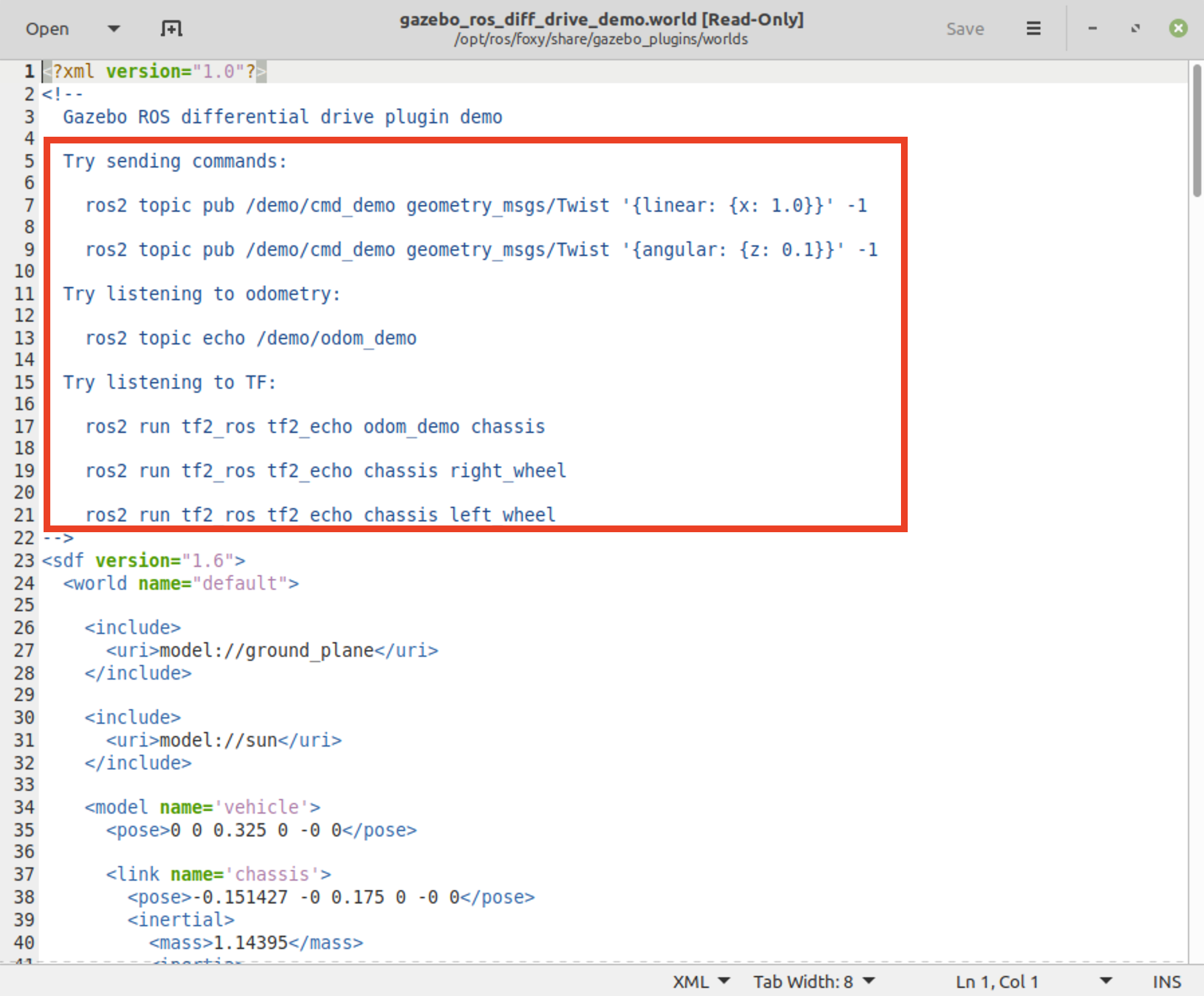
6. 새로운 터미널을 열고 아래의 명령어로 현재 world 파일을 확인해 볼 수 있다.
gedit /opt/ros/foxy/share/gazebo_plugins'/worlds/gazebo_ros_diff_drive_demo.world가장 상단에 예제 commands가 보인다.
7. 새로운 터미널을 열고 ros2 소싱을 한 후, 다음 예제 명령을 실행하면 차량이 앞으로 움직이는 것을 확인할 수 있다.
# ROS2 소싱
source /opt/ros/foxy/setup.bash
# X축 방향으로 이동시키기
ros2 topic pub /demo/cmd_demo geometry_msgs/Twist '{linear: {x: 1.0}}' -1

8. 터미널에서 Gazebo 명령으로 Gazebo를 실행할 수 있다.
'ROS2' 카테고리의 다른 글
| ROS2를 활용해서 xArm5 Lite 제어하기 (0) | 2020.09.10 |
|---|---|
| ROS2 용어정리 (0) | 2020.09.10 |
| Turtlesim 패키지 설치 및 테스트 (0) | 2020.09.10 |
| Linux에 ROS 2 설치하기 (0) | 2020.09.03 |
| macOS에 ROS 2 설치하기 (2) | 2020.09.03 |



댓글